十年前,我第一次在注塑机控制柜里看到那两根搅在一起的黄绿线,旁边一个标注着‘CAN_H’‘CAN_L’的端子,说实话,我没当回事。不过是又一个现场总线嘛,还能比以太网快?后来,整整三天,我被设备时好时坏的通信故障折磨到怀疑人生——示波器一接上才看出来,波形反射得像心电图,终端电阻少了整整一个。从那时候起,我对CAN总线的敬畏就烙在骨子里了。这个由博世在80年代为汽车搞出来的协议,现在居然还在工业现场大行其道,而且越混越硬。凭什么?
”CAN总线到底是个啥?——别拿485那套来对比
别被教科书上‘控制器局域网’这种翻译带偏了。CAN的精髓就一条:多主架构,非破坏性逐位仲裁。你只要记住,任何时候,任何一个节点都可以往总线上发报文,谁优先级高谁先走,其他节点自动退让。这跟RS485那种轮询式的主从结构完全不是一个物种。485是班主任点名,CAN是自由辩论会,嗓门大(报文ID小)的先开口,而且一点带宽都不浪费。💡
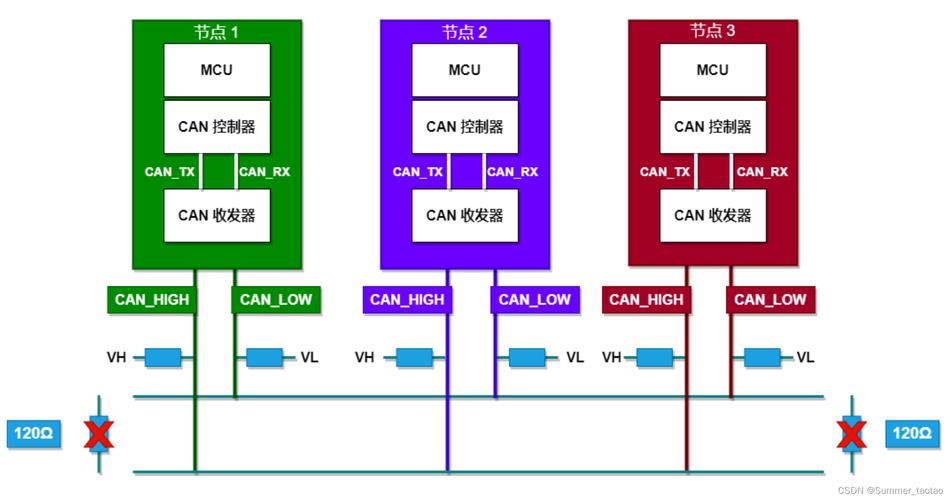
物理层更是皮实。双绞线差分传输,抗共模干扰能力强得离谱。就算你在一台30kW变频器旁边甩着线,只要屏蔽接地没偷懒,报文照样稳如狗。电平逻辑也很直白:CAN_H比CAN_L高2.5V左右才是显性位,否则隐性位,这种隐性电平的反馈机制直接实现了逐位仲裁——报文ID越小,优先级越高,0就是显性,直接覆盖别人的1。厉害吧?
不过话说回来,很多人以为CAN一接上就能用,大错特错。波特率、采样点、终端电阻……少一个环节,就能让你查故障查到怀疑人生。
现场布线翻车集锦——终端电阻和拓扑的坑
早年我负责一个汽车焊接产线的改造,从德国转运过来的库卡机器人之间用CAN总线通信,线缆重铺后调试,一开机就偶尔掉站。两个工程师轮流查程序,查了三天。最后我拿着LCR电桥去量终端电阻——车间的师傅把120Ω的电阻焊反一个,总线两端各剩一个60Ω的,阻抗不匹配,信号反射得一塌糊涂。❗
这还不算什么。有的现场给你把CAN线跟动力线捆在一个线槽里走,没加屏蔽甚至屏蔽层单端接地都搞错,变频器一开,CAN报文直接被瞬间干扰脉冲打丢。其实规范很简单:首尾两端必须各接一个120Ω/0.25W的终端电阻,线缆必须是特性阻抗120Ω的屏蔽双绞线,屏蔽层要单点接地,整个网络不能有星型分支,支线长度严格限制。最后一条,别说施工队,很多设计院工程师都不清楚。CAN是直线型的,硬生生被焊成菊花链,偶尔也能用,但波形质量差得想哭。
✅ 一个土办法:手摸终端电阻。上电正常时,电阻微热属正常,如果烫手,那你的共模电压可能已经飘到天际了。
问:我的CAN总线每隔几分钟就掉一次线,然后自己恢复,日志也看不出毛病,怎么回事?
答:这种间歇性故障,大概率是终端电阻虚接或者总线电气接触不良。先检查总线上所有节点,看是否有人把终端电阻随便拧在螺丝端子上,震动久了松动。其次,用示波器单次触发捕捉CAN_H和CAN_H的差分波形,尤其在错误帧产生瞬间,你会看到波形出现明显的台阶或反射。还有个冷门原因:某些节点的CAN收发器进入睡眠模式后没能及时唤醒,导致应答错误,积累到一定数量后控制器进入错误被动状态,自动脱离总线。换用具有唤醒功能的收发器,或者软件上定期发假报文保持心跳,可以搞定。
上层协议才是灵魂——裸CAN就是个半成品
CAN协议本身只定义了物理层和数据链路层,最多给你8个字节的数据场,怎么用全凭你自己。这就好比给你一个信封,里面的信是法语还是中文它不管。两个节点光靠裸CAN能直接对话吗?不能!因为它们对报文ID的分配、数据格式根本没有共识。所以,就有了CANopen、DeviceNet、J1939这些上层协议——这才是让CAN在工业界遍地开花的核心。
拿CANopen举例,它定义了对象字典、PDO(过程数据对象)、SDO(服务数据对象),还有心跳、节点保护这些机制。你在一个驱动器上看到支持CANopen,那么主站就能直接通过PDO远程调转速、读电流,配置参数用SDO,连接起来有标准EDS文件,省心省力。说实话,没有CANopen,伺服驱动器的CAN通信就是一堆不明所以的十六进制报文,配置到天荒地老。
现在不少国产伺服、传感器、编码器都标称支持CAN总线,但若不说清楚遵循什么上层协议,你买回来大概率只能干瞪眼。务必问清楚:是CANopen DS301还是DS402?设备行规是哪一种?否则不同厂家的设备之间根本互操作不了。❗
问:我买了两个支持CAN通信的传感器,想直接让它们传数据,为什么不行?
答:因为纯CAN通信只是解决了物理层和数据链路层的传输,相当于两人拿对讲机,但一个讲中文,一个讲英文。传感器A按自己的格式发每帧8字节,传感器B不知道这些字节代表什么,更不知道什么时候发。想让它们协同,必须要有相同上层协议,比如都跑CANopen,或者自定义一个简单协议:规定好报文的标识符、数据场的分割方式、触发方式(定时发送、询问发送等)。否则,两条传感器根本没法直接通信,只能通过主站中转解析。这也是为什么现场经常出现‘明明硬件连接都对,数据就是读不上来’的原因。
查故障的工具——没有示波器和分析仪就是耍流氓
我用过的CAN工具从大几千的PCAN-USB到上万的CANoe,再到便携示波表,心得就一条:别在工具上省钱,它能帮你省命。有一次现场,某品牌机器人控制器与IO模块之间CAN通信全瘫,我用分析仪把总线上的报文抓出来,发现某个IO模块一直在发错误帧,占满带宽。原因竟是模块内部电源隔离失效,导致CAN收发器共模电压超标。这种问题,用万用表量电压根本看不出来,只有波形才能暴露真相。
示波器我推荐至少双通道,带宽100MHz以上,存储深度要够抓满一个完整报文帧。我习惯把CH1接CAN_H,CH2接CAN_L,然后用数学通道做差分分析。差动电压幅值正常应该在2.3V~2.5V左右,低了意味着总线负载过重或线缆过长;反射导致的台阶毛刺一眼就能看出来。有时候看到隐性电平被拉得乱七八糟,那八成是多个节点电源隔离不好,共模干扰串进来了。别信那些廉价的逻辑分析仪解码CAN,时序误差大得离谱,报错让你追到想哭。❗
至于CANopen这样带协议的诊断,周立功的CANPro、开源工具CANopen Magic都不错,能解析对象字典,直接看到心跳包、NMT状态。不过,协议分析的前提是你对CANopen状态机足够熟,否则报错NMT Slave Boot-up超时,你查一天可能还是不知道节点到底卡在哪个状态。所以,平时多翻对象字典手册吧,别到了现场才临时抱佛脚。
说了这么多,其实CAN总线这个老家伙,生命力强就强在它的开放性和实时性。现在工业4.0都要上OPC UA、TSN了,但靠近执行器和传感器的底层,还是CAN在扛大旗。毕竟,不是所有设备都需要千兆以太网,但所有设备都怕通信延迟。CAN的低延迟、确定性,在运动控制、汽车安全领域,短期内无可替代。不过,用得好是兄弟,用不好就是魔鬼——细节、细节,还是细节。