上周,一个客户打电话过来,声音里透着绝望:“张工,我这伺服电机又烧了!三个月第三台了!” 我问他工况,他说是拖着一个大转盘,频繁启停。我叹了口气——这兄弟又掉进选型陷阱了。说实话,伺服这玩意儿,看着参数表选很容易,但真正用起来,水可深了。❤️
扭矩不是越大越好?被忽视的细节
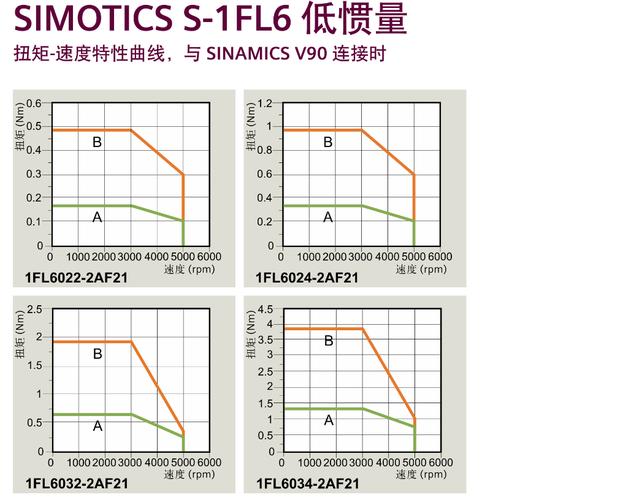
很多人选伺服电机,第一步就是算扭矩,然后留个余量,就完事了。大错特错!连续额定扭矩和峰值扭矩到底怎么取?你那个“余量”真的够吗?我见过一个案例,马达铭牌上写着5Nm,客户实际用到4.8Nm,心想没问题。结果一个星期后,过热报警。为什么?因为他忽略了那个该死的速度-扭矩曲线。在高速段,扭矩是往下掉的!不是一条直线。
还有惯量匹配。电机转子惯量和负载惯量的比值,很多手册说5:1以内,有些说10:1也行。但如果你要高频响、高精度,最好3:1以下。否则,你调试的时候会哭的——这个后面再说。
问:选伺服电机时,惯量比为什么这么重要?
答:简单讲,惯量比影响系统的响应速度和稳定性。电机惯量小,负载惯量大,就像一个瘦子想快速推动一个大胖子,很容易产生过冲、震荡。而且,减速机虽然能折算惯量,但别忘了它本身也有背隙和刚度问题!
编码器的秘密:绝对还是增量?
我第一次用绝对式编码器的时候,被它的省事惊艳到了——上电就知道位置,不用回零。❗但价格也真让人肉疼。如果你的设备每次断电后位置都会变动,比如机器人关节,绝对式是必须的。要是只是传送带上的简单定位,增量式足够了,配上Z相脉冲,回零一次也还行。不过话说回来,绝对值的多圈技术也有坑:有些是用电池记忆,电池没电了,位置就丢了。现在更流行的是无电池多圈,靠韦根传感器,但价格嘛……你懂的。

分辨率呢?常常有人死磕17位、23位,其实对于大多数工业场景,20位已经足够。分辨率越高,对机械安装精度和电磁干扰越敏感。我见过一个项目,换了高分辨率编码器后,轴反而抖得跟筛子一样,就因为联轴器有那么一丝不对中。
调试时那该死的振动——惯量比失调
回到开头那个烧马达的客户。我让他把伺服驱动器的增益参数发过来一看,好家伙,刚度设得老高,积分时间巨小。我问他:“你是不是自己瞎调了?” 他支支吾吾:“我看网上教程说,增益越高,响应越快……” 唉,增益不是这么玩的!
惯量比太大,还强行提高增益,系统就开始自激振荡,电流忽大忽小,电机和驱动器都发烫。❗这种振动,有时候肉眼可见,有时候微小到只能听声音——高频的“嘶嘶”声。长时间下来,要么驱动器过流报警,要么电机退磁。那个客户,就是因为转盘负载惯量是电机的12倍,他还把速度环增益调到了推荐值的两倍。
问:如何凭经验判断伺服电机刚度是否调得过高?
答:听声音和摸手感。正常运行时,电机应该很平滑。如果发出尖锐的电流声,或者电机轴在停止时有肉眼可见的震颤,往往是增益过高。另外,可以用手轻轻触摸联轴器(注意安全!),如果感觉到高频微振,就是刚度过了。还有一种土办法:用示波器看电流反馈,正弦波上带刺,就别再往上调了。
环境与温度的肮脏小事
你以为温度只是电机铭牌上那个“环境温度40℃”?天真了。伺服电机常装在密闭的电柜里,或者和热源挤在一起。我量过一台在夏天运行的冲压机旁边的伺服电机,表面温度75℃——虽然电机的绝缘等级是F级(155℃),但长时间高温会让永磁体慢慢退磁,扭矩永久下降。所以,过载能力不是恒定的,高温下必须降额使用。
还有防护等级。IP65的电机,如果长时间在潮湿环境,或者清洗时会喷到水,最好还是加个防护罩。我碰到过一个食品厂,24小时用高压水枪冲洗车间,结果IP65的伺服电机接线盒进水,烧了驱动器。后来改了IP67带油封的,才消停。
问:带抱闸的伺服电机,抱闸信号该由驱动器控制还是PLC直接控制?
答:强烈建议由驱动器控制!因为驱动器有一个抱闸输出逻辑,可以在电机使能释放时,延迟抱闸锁死,防止垂直轴因重力下坠。如果PLC直接控制,时序配合不好,要么抱闸磨损过快,要么负载滑落。不过,有些急停回路,必须用安全继电器同时切断使能和抱闸,那是另一回事了。
选型的时候,电磁制动器的静摩擦扭矩通常选电机额定扭矩的1.5倍以上。要是垂直轴,就得算清楚总重量和减速比,千万别忘记安全系数。我早年曾经忽略了一个丝杆的效率,结果抱闸刹不住,砸了模具……赔的钱够买十台电机。😅
絮叨这么多,其实就一句话:伺服电机是个系统工程,不是单个零件。从伺服驱动器的参数设置,到刚性联接的精密加工,再到布线和屏蔽,每个环节都可能让你翻车。别光盯着参数表上的那几条曲线,多看看实际工况、环境,还有你那调不好的电压波动。行了,就这些,希望下次烧马达的人不是你。