选型迷思:六轴就一定比四轴强?
先泼盆冷水:别被参数迷眼。很多厂家宣传六轴灵活,可你的工序真需要那俩冗余轴吗?一个简单的码垛,四轴SCARA加个升降台,节拍比六轴快一倍,价格便宜三分之一。但有些集成商就爱推贵家伙——你懂的。 上周去东莞一个电子厂,产线上挤了八台六轴,结果过半在等料,动作还颤颤悠悠。主管跟我吐槽:“当初说能打磨能装配,现在光调碰撞检测就花了两周!”所以选型第一条:先搞清末端执行器要干啥。抓焊枪?上气动抓手。吸玻璃?得用真空。这些玩意儿换起来比机器人本体还费钱,可没人告诉你。 问:协作机器人真能完全替代人工吗? 答:不能。至少目前。协作臂优点多,灵活安全,但速度慢、负载小,碰上需要大力出奇迹的工位就怂了。不过机器视觉引导抓取确实进步了,比如无序分拣,以前全靠人眼,现在3D相机加算法,但光照一变化,误抓率飙升,还得人盯着。上周某物流仓的视觉拣选系统,日光灯角度一变就瞎,最后临时拉个窗帘——你看,机器人技术再炫,也怕自然光捣乱。
集成商不会告诉你的坑

从“能跑”到“跑得好”,差距在哪?
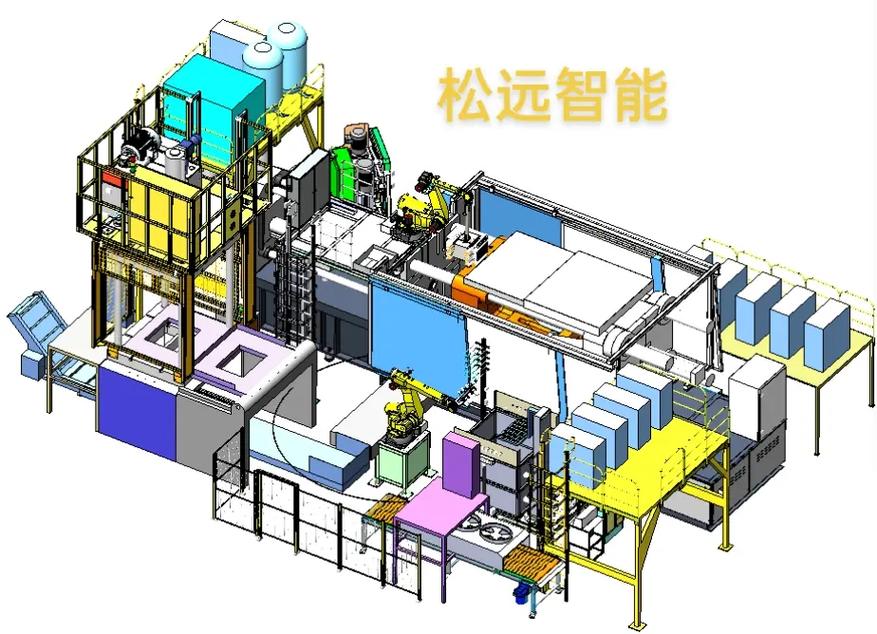
有人说机器人技术现在停滞了,我不同意。只能说从“能跑”到“跑得好”,中间隔着无数细节。比如路径规划,大部分人只懂示教复现,稍微变个工件就得重新教。而真正用好离线编程和仿真,能缩短80%调试时间。可这需要仿真环境与真实车间标定误差小于0.5mm——有几个厂能做到? 再比如机器视觉,现在都喊AI检测,但缺陷样本不足,模型就废了。做铸造件检测,气孔、缩松千奇百怪,你得喂够一万张标注图才能达标,中小企业哪来这资源?于是取巧,用传统算法加模板匹配,凑合过。但碰上换型号,又得折腾。这种现实,只有车间里泡过的人才体会。 最后说个欣慰的事。上周去看一个压铸岛,机器人取件、切边、打磨一气呵成,旁边还有个协作机器人做漏检补检,工人就搬个凳子刷手机——问累不累,他说:“以前搬件腰废了,现在盯故障灯,偶尔换换吸盘。”这才是机器人该有的样子:不是替代人,是把人从脏累险里拽出来。但这条路,配套技术、管理思维,都得跟上。急不得。