去年去一家汽车零部件厂,差点被一台装配机器人吓到。它挥舞着六轴手臂,咔咔几下就把一个精密组件装好,速度比旁边熟练工快三倍。事后我盯着它看了很久——这玩意儿,是不是要造反?
说实话,那是我第一次近距离看装配机器人大批量干活。以前只在展会上见过演示,悠悠哉哉的,没啥压迫感。但产线上完全是另一种生物。那种节拍、那种不知疲倦的劲儿,说实话,有点震撼。
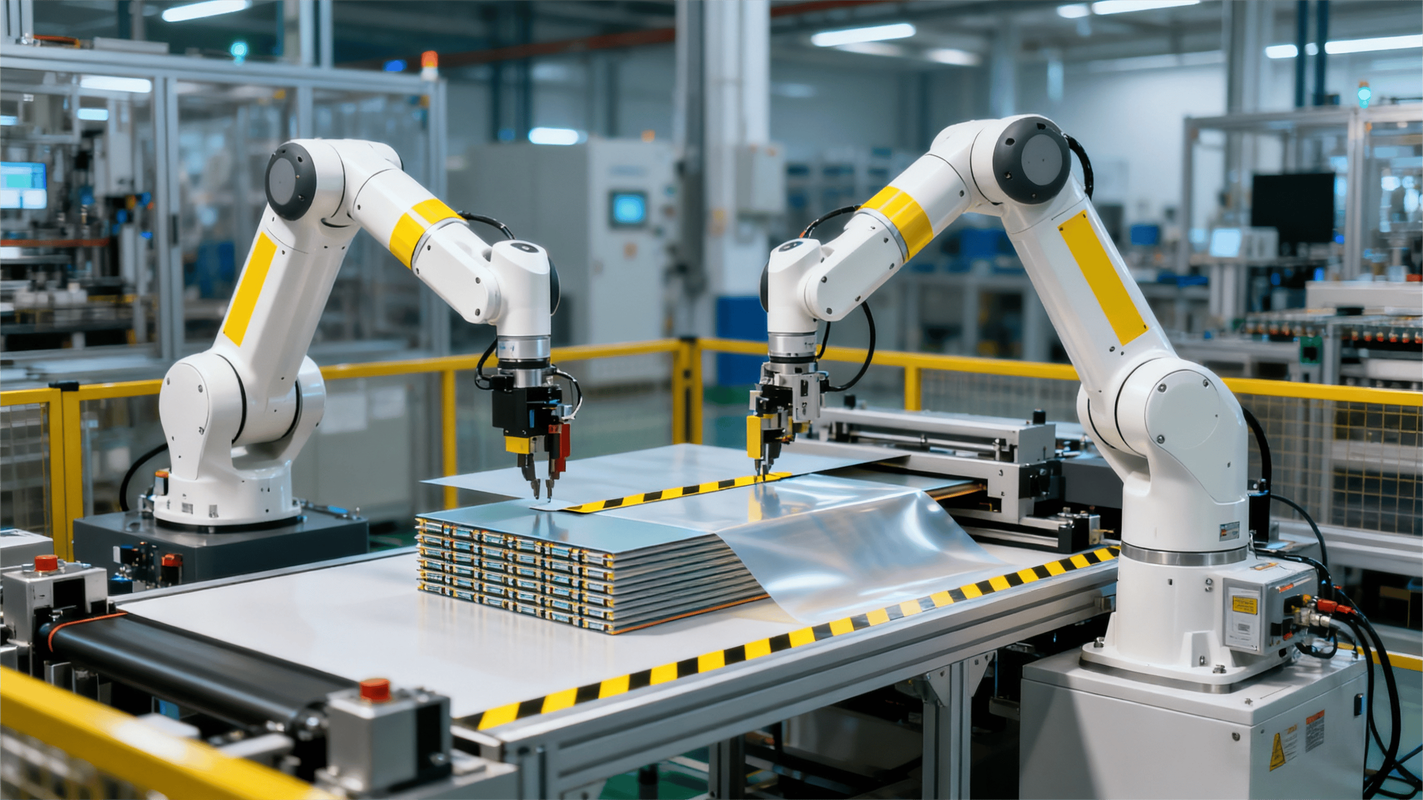
一、装配机器人的“肌肉”与“大脑”
装配机器人不是铁疙瘩乱撞。它的“肌肉”是关节模组和末端执行器。主流类型:六轴关节式,自由度最高,能摆各种奇葩姿态,适合复杂装配;SCARA,平面关节,速度贼快,3C电子装配里一抓一大把;直角坐标,结构简单,精度好控制,适合大件搬运或点胶;还有近几年火的协作机器人,轻量化、带力控,能和工人并肩作业,不用安全围栏——这玩意儿我是又爱又恨,后面细说。

“大脑”呢,就是控制器和算法。传统机器人靠示教器点位编程,现在都搞视觉引导了。加个相机,随机抓取、纠偏装配,对来料一致性要求瞬间降低。我见过最狠的方案,用3D视觉直接识别整个装配场景,自动规划路径,省去示教时间。不过调试难度也指数级上升,没点机器视觉功底根本玩不转。
还有力控传感器,这东西在精密装配里是灵魂。比如轴承压装,力量大了损伤零件,小了装不到位,全靠力反馈闭环控制。有一次我们给减速机装油封,死活压不好,后来换了带力控的装配单元,良率直接从80%蹦到99.9%。那种拨云见日的感觉,爽!
二、选型不是买白菜,这几个坑我替你踩过

很多老板上来就问:“那什么,你们家机器人能装螺栓不?多快?” 不问工况、不问来料、不问节拍——这就像买鞋不问尺码,能合脚才见鬼。选型最容易被忽视的参数?我觉得是重复定位精度和绝对精度的区别。厂家宣传册上0.02mm精度,看着很美,那是重复精度。绝对精度可能差到0.5mm以上,尤其大臂展关节式,温变、减速机回差都会漂移。你要是靠它盲装精密销孔,等着哭吧。
问:选型时最容易被忽视的参数是什么?
答:我说一个——节拍时间下的稳定性。很多方案跑demo 30次没问题,一上量连续跑两小时,关节过热、定位飘了、皮带松了,节拍直接掉15%。所以必须要求厂商提供在实际负载和80%额定速度下的重复定位测试数据,至少持续4小时。别信PPT上的理论节拍,那都是实验室理想状态。
还有,别盲目追求六轴。如果平面作业,SCARA效率高得多,成本还低。我见过最蠢的设计是把SCARA当关节用,节拍慢了20%不说,精度还一塌糊涂——那个项目最后黄了,教训啊。另外,末端夹具设计比机器人本体还重要,气动还是电动?需不需要快换?要不要集成力控?好多集成商敷衍了事,结果设备半残。
三、未来工厂:人机共舞还是机器人独舞?
现在老说“无人工厂”,但装配线能做到完全无人吗?短期内不可能。装配工位太复杂,小批量多品种的柔性装配,人还是比机器强。不过协作机器人确实打开了新路子。它不用安全护栏,人和机器直接配合,工人做灵巧动作,机器人干重复体力活。我们去年在一个电子车间引入了协作装配,人工减少了40%,效率却提了25%。最意外的是,年轻工人反而更愿意来了,因为工作不那么枯燥,还有种“训练铁甲小宝”的乐趣。
问:相比传统工业机器人,协作装配机器人贵吗?
答:单看本体价格,协作确实贵一截,主流品牌一台十几万到二十几万,同负载的工业机器人可能只要十万出头。但算系统集成总成本,协作反而可能省钱——你不需要围栏、安全光幕、安全PLC,部署周期短,场地灵活。对于经常换线或空间紧凑的厂,协作性价比高。但如果大批量、高节拍、重负载,传统工业机器人还是王者,皮实耐造,精度保持性好。选择之前,把总拥有成本(TCO)算清楚,别光瞄着报价单。
话说回来,现在装配机器人的AI化趋势有点猛。深度强化学习让机器人自己摸索装配策略,失败了自我调整,这种已经在学术界搞了好几年。不过工业落地还早,客户要的是可靠,不是炫技。我倒觉得数字孪生更实在——在虚拟环境里模拟调试,缩短现场停工时间。上个月帮一个产线做数字化改造,装配机器人的离线编程加虚拟调试,停机时间减少了60%,那甲方爸爸笑得合不拢嘴。
最后吐个槽。搞装配机器人这些年,最烦那种“万能的”集成商宣传,好像买台机器人就能解决一切问题。醒醒吧!没有强大的工艺支持、没有靠谱的夹具设计、没有数据打通的MES,机器人就是高级摆设。下次再有人说装配机器人会让工人下岗,我建议他亲手下车间调一次视觉定位,看看到底是人伺候机器人,还是机器人伺候人。
说到底,装配机器人就是一把好扳手,用好了披荆斩棘,用不好砸自己脚。对吧?