点云稀疏得像秃子的头皮。噪声多到能逼死密集恐惧症。但是半年后再看,真香。
激光雷达这玩意儿,在工业圈里早就不是新东西了。上世纪60年代就有雏形,但真正爆发也就是这几年的事。自动驾驶炒得热火朝天,很多外行以为激光雷达只是用来给无人车避障的——错,大错特错。在制造业、重工、矿山、港口这些地方,它早就是不可或缺的眼睛。
测距精度:不是毫米就行?
很多人张口闭口“毫米级精度”。真要较真,激光雷达的测距精度是分场景的。室内近距离,轻松做到±2mm;放到室外强光下,200米外还能保持±5cm就算顶尖了。为啥?
光线干扰。反射率。目标表面材质。黑色橡胶和白色石膏板,回波强度能差几十倍。这就涉及到激光雷达的反射率标定,一个让算法工程师掉头发的活儿。
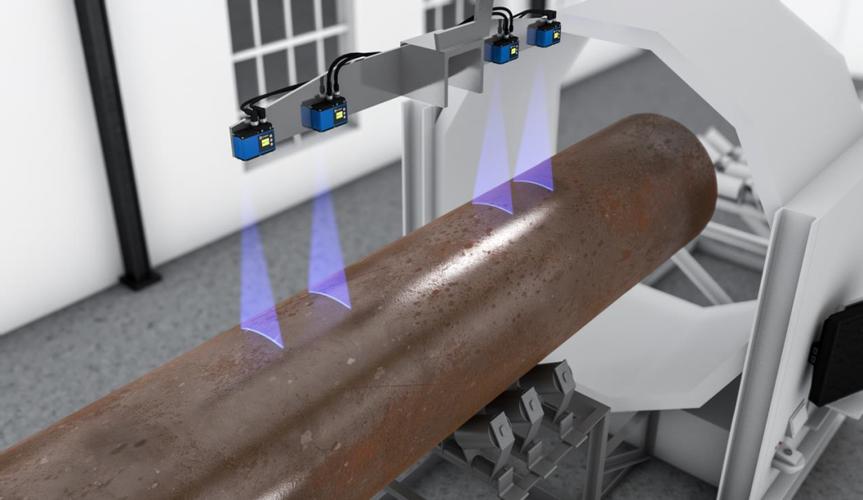
我见过最离谱的项目,是给钢厂的热轧线做钢坯定位。800℃的红热钢坯,表面氧化铁皮像镜子一样乱反射,雷达一打上去,点云直接飘成烟花。后来怎么解决的?——多回波技术,同一个脉冲收回来两三个回波,用算法滤掉杂散干扰。当然,价格也翻了一番。
问:工业激光雷达和车载激光雷达到底有什么区别?
答:区别大了去了。车载雷达拼命追求小体积、低成本,恨不得塞进后视镜。工业雷达呢?体积大点没关系,关键是防护等级和接口协议。IP67是起步,有的要IP69K,能扛高压水枪冲洗。车载通常用CAN或以太网,工业场合呢?Profinet、EtherCAT、EtherNet/IP……你得伺候一堆PLC大爷。而且工业雷达的抗振动和电磁兼容标准,比车载严格一个量级。简单说,车载怕贵,工业怕死。
固态还是机械?一个永恒的话题
机械式激光雷达,里面电机带着镜子转,360°扫一圈。经典产品比如Velodyne的HDL-64,丑得像外星探测器,但可靠性真是变态。我们实验室有个2015年的老家伙,至今精度漂移不到0.1°。
但是它贵啊!而且谁敢把它装在叉车上整天颠?电机机械磨损,半年就得校准一次。
于是固态激光雷达成了新宠。MEMS微振镜、光学相控阵(OPA)、Flash面阵……各家路线打得不可开交。MEMS最成熟,但也最尴尬——振镜角度一做大,寿命就悬崖式下降。OPA听起来美好,但旁瓣控制能做到-30dB才算及格,目前量产还早。Flash更别提,功率限制了探测距离,太阳光底下就是瞎子。
有意思的是,工业圈里最近开始流行一种“转镜式”方案,介于机械和固态之间。一个楔形棱镜旋转,把一束激光导向不同方向。结构简单,抗振不错,成本可控。国内几家创业公司靠这个闯出了点名声。
问:选激光雷达时,最容易被坑的参数是哪个?
答:探测距离。厂家标的“最大探测距离”通常是在10%反射率目标下的极限值,实际你拿一块水泥墙去试,可能一半都不到。一定要看厂商给出的距离-反射率曲线,最好自己实测。另外,重复精度和绝对精度是两码事,有人把重复精度当绝对精度宣传,坑了不少采购。还有就是出点数,单线回波出100万点/秒,一听吓人,其实垂直分辨率可能只有几度,点云密度极不均匀。所以,看FOV、角分辨率、帧率,三个要结合起来算。
点云处理:真正的瓶颈
买雷达,很多人只盯着硬件参数。其实软件和算法才是王道。
一张原始点云,几百万个点。怎么从中提取出有用信息?点云分割、特征提取、目标识别,每一步都是坑。工业现场环境复杂,粉尘、水雾、振动造成的伪影,比实验室里多十倍。算法必须要鲁棒,这个鲁棒不是写论文说说的,是实际跑三个月不出错。
SLAM也是重灾区。激光SLAM在室内定位上已经很成熟了,但室外大场景呢?动态物体多,回环检测难。我们给某个港口做自动化轮胎吊,堆场里全是集装箱,雷达扫出来的几何特征高度重复,算法经常把自己“绑”在错误的位置上。后来加了视觉惯导融合才勉强解决。
所以,激光雷达是个系统工程。硬件是眼睛,算法是大脑,缺一不可。很多集成商上来就问“你们雷达看得远不远”,却从来不问“你们能不能在雨天工作,能不能区分铁栅栏和行人”。真心无语。
问:激光雷达在AGV/AMR上怎么选型?
答:AGV通常采用2D激光雷达(实际是单线扫描),做安全避障和导航。安全型雷达必须通过PL d或SIL2认证,比如SICK的S300系列,贵得肉疼。但法规强制,没得选。导航雷达则可以用国产的,性价比高。多线雷达一般用在3D避障或高精度对接,比如用多线做栈板识别。记住,2D雷达的安装高度和俯仰角必须严格计算,倾斜一度,地平线就歪了,数据全乱。
激光雷达这行,水很深。但正因为如此,每一次突破都让人兴奋。从机械到固态,从单线到多线,从单一传感器到多融合,我们正在见证工业感知能力的质变。那些还在酸“激光雷达无用”的人,大概率没在零下30度的码头调过车。
最后一句忠告:别迷信参数,多下现场。点云会告诉你一切。