现在很多文章聊视觉、聊AI、聊数字孪生,仿佛装上摄像头、连上5G,工厂就脱胎换骨了。💡 老实说,我跑了不下两百家工厂,发现码垛、搬运、焊接这些活儿,出幺蛾子的往往还是基础机械部件。 减速器、伺服电机、线缆护套……特别是那些每天重复三五万次动作的工位,刚性冲击像慢性毒药,RJ45接头松了都能让产线停半天。有一次在苏州,一台协作机器人突然报警“关节过载”,你猜怎么着?只是法兰面一颗螺丝没打螺纹胶,振动导致预紧力消失——就这么简单,但排查花了我们六个小时。
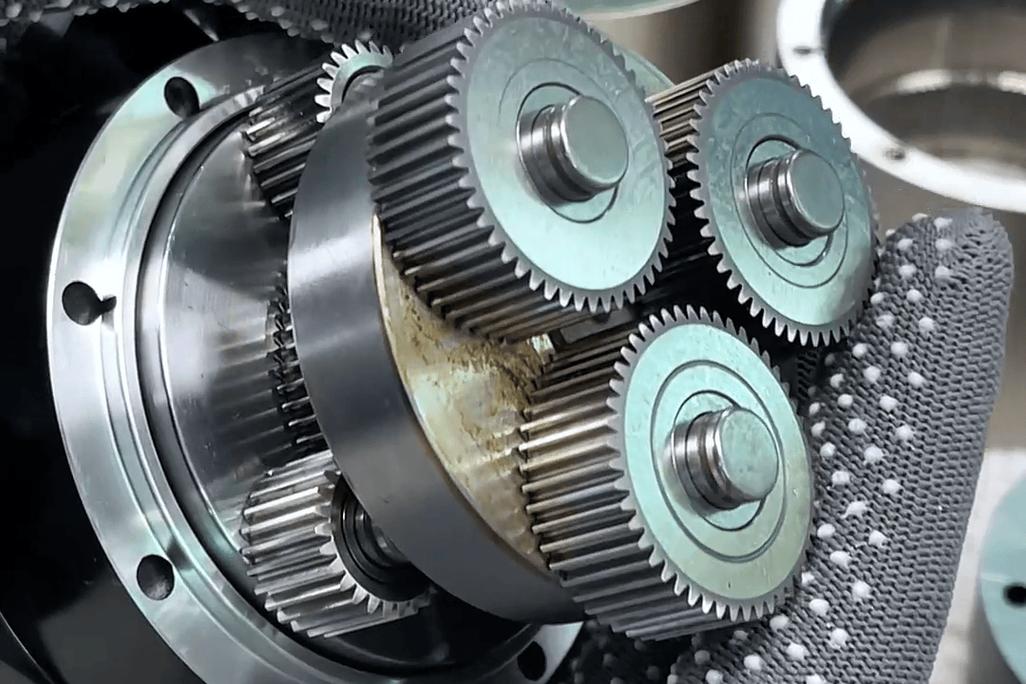
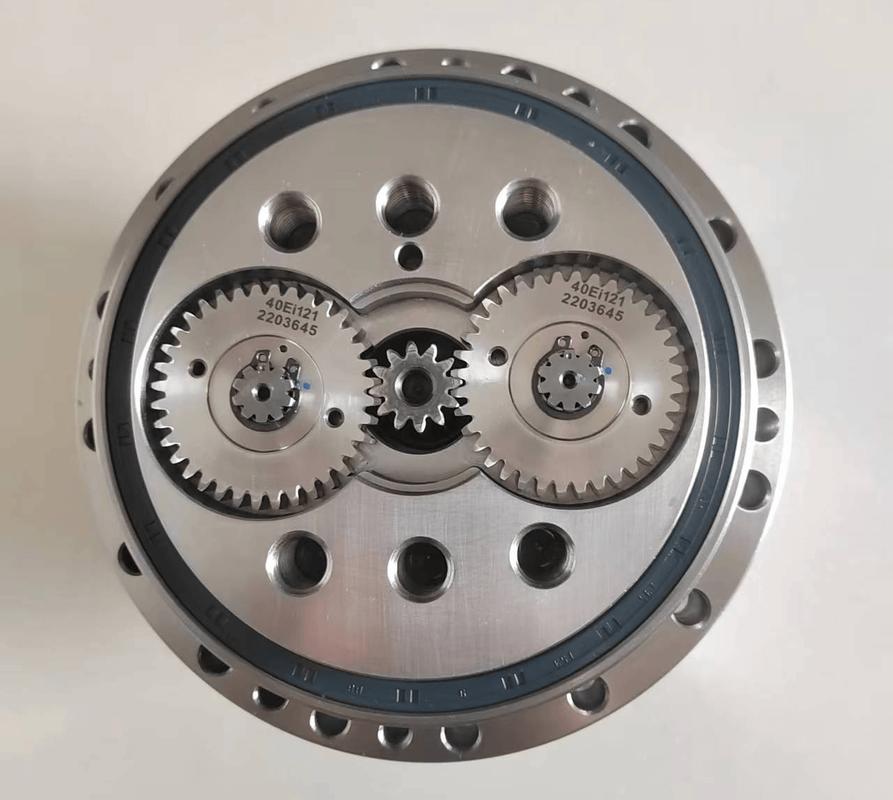
谐波减速器和RV减速器:不只是精度那点事儿
不少人觉得,选减速器就看背隙、扭矩密度、寿命曲线。对,数据手册谁都读得懂。但现场呢?我记得给一家医疗器械商做集成,用某品牌的谐波,装上去静态精度完美,一跑高速就“嘶嘶”叫,跟煮开水似的。 润滑脂甩得到处都是。后来拆开,柔轮与刚轮的啮合位置偏了0.02毫米——装配车间温度没控制好,壳体热胀冷缩的锅。说实话,很多厂家现在追国产替代,绿的、来福的谐波确实性价比高,可安装手册里写的‘环境温度25±5℃’,多少车间真做到了?😮💨RV减速器相对皮实,但结构复杂得像块机械表。有一次帮汽车零部件厂改造点焊机器人,旧摆线轮磨损,换新件后刚度还掉了一截。查了半个月,才发现是偏心轴轴承预压调节不当——那玩意儿需要百分表、扭力扳手和手感,光看力矩曲线没用。❗ 老钳工的手艺,在这种毫米级以下的怪圈里,比算法金贵。
机械臂“末端执行器”的暗坑,没人告诉你
话题扯远一点。你觉得工业机器人最让人血压飙升的是什么?不是本体,是爪子。夹持、吸盘、焊枪……尤其那些多品种小批量产线,换型时爪子一调就是大半天。去年给人做拨片式离合器片码垛,吸盘方案明明仿真没问题,上料时却总把最上面一片工件“粘”起来,一摞全乱。最后怎么解决的?在吸盘边缘开了四个0.5毫米的小槽,破坏真空度——这种土招数,论文里可没人写。😂问:协作机器人真的安全吗?我看好多演示都直接在人旁边工作,碰到人会停下?
答:安全分等级。多数协作机器人靠电流环检测碰撞,但如果你穿着厚工服,或者末端带着锋利毛刺的钣金件,轻微割伤风险还是存在。严格来说,ISO 10218标准里,功率及力度限制只是基础,还得做全风险评估。我见过有些厂把急停拍下后,机械臂因自重下坠十几厘米,差点砸到人手——那可是出了力控版本的机器人啊。所以别光看demo,要看失效模式下的行为。
问:我们厂想上焊接机器人,但焊缝总是歪歪扭扭,是不是得先上激光跟踪?
答:先检查地脚螺栓和工装。很多焊接抖动是因为底座刚性不足,或者变位机的回差大了。激光跟踪是锦上添花,如果基座在抖,传感器数据自己都在晃,怎么补?另外,焊枪的导电嘴磨损、送丝管弯折也会导致不稳定。我自己排故的逻辑:机械紧固→焊材对中→最后再查视觉系统,顺序对了能省一周时间。
PLC与机器人通讯:别死在协议差那一步
现在工业机器人基本都支持EtherCAT、Profinet,但你知道厂家玩了多少花样?某日系品牌机器人,标准Profinet居然要有偿开启,且DWord排列是大端序,而西门子PLC默认小端序。 第一次接的时候,字节全倒过来,莫名多了6毫米的偏移量,一套夹具撞了两次才发现。还有一次,机器人做Modbus TCP主站,轮询十来个从站,延迟累积到400毫秒——包装线就这样,瓶子全倒了。最后被逼得用EtherNet/IP的隐式报文,延迟压在8毫秒内。这些坑,系统集成商都揣着不说,因为说了显得自己不够“方案型”。😤最近开始玩5G+网联云控,概念很热。可是,在冲压车间那种电磁干扰密布的地方,5G网关的丢包率能到1.2%,同步精度直接崩盘。我跟宁波一家模具厂试过,最后还是老老实实拖了根铠装光纤,还加了磁环。工业现场,有线永远是最可靠的,除非你愿意为某个概率付出代价。
问:国产工业机器人和四大家族比,现在差距在哪儿?
答:系统集成度和动态精度。单看重复定位,很多国产牌子都做到±0.02mm了,但连续圆轨迹的转角过冲、低速爬行现象还是多一些。另外,调试软件的人机交互,真的劝退。有些示教器界面逻辑像20年前的诺基亚,培训操作工要三天。不过,在冲压、注塑这些单一工序上,量大管饱,回本周期确实短。💡 建议实打实做7×24小时老化测试,带载测,别空跑。 说到底,机器人技术不是ppt里的炫酷动画。是螺栓扭矩、油脂牌号、通讯字节序和车间地坪平整度的总和。每一次“无人化”的梦想,都由无数个“有人解决”的深夜支撑着。