上个月去客户工厂,看到产线上那个六轴机械臂悠悠荡荡地转过来,旁边工人下意识地往后躲了一下——虽然嘴上说‘习惯了’,但眼神骗不了人。说实话,这种半信半疑的状态,比机器直接故障更让人后背发凉。
为什么这么说?因为协作机器人的本质就是打破围栏,和人共享空间。可一旦物理隔离没了,风险就变了味。不是简单地‘夹到手’或者‘撞到人’——而是力、速度、接触面积这些参数的组合,会在某个瞬间跨过安全阈值。而有多少一线操作工真正理解这个?答案可能让你皱眉。

那一纸标准,到底管得住多少意外?
提起‘工业安全标准’,不少人脑子里蹦出来的还是那套老掉牙的GB/T 15706——机械安全基本概念与设计通则。对,这玩意确实基础,但面对这种主动与人‘亲密接触’的设备,它就像拿交通规则去管F1赛车。所以后来才有了ISO 10218-2,专门针对工业机器人系统;以及更狠的ISO/TS 15066,直接把协作场景的安全要求钉死在技术规范里。
可问题来了:标准是一回事,落地又是另一回事。我就见过一个活生生的案例,某电子厂装了协作臂做螺丝锁附,安全设置中最大动态功率只调到80W,觉得‘肯定不会伤人’。结果呢?有次轨迹偏移,臂端工具直接戳到工人掌心,万幸只是淤青。事后复盘的结论让人哭笑不得——他们的风险评估根本没考虑末端工具的瞬态力!标准里写得明明白白:末端执行器也算在运动质量里,可实操中谁认真校核过?
人机接触的四种方式,别只盯着静止力
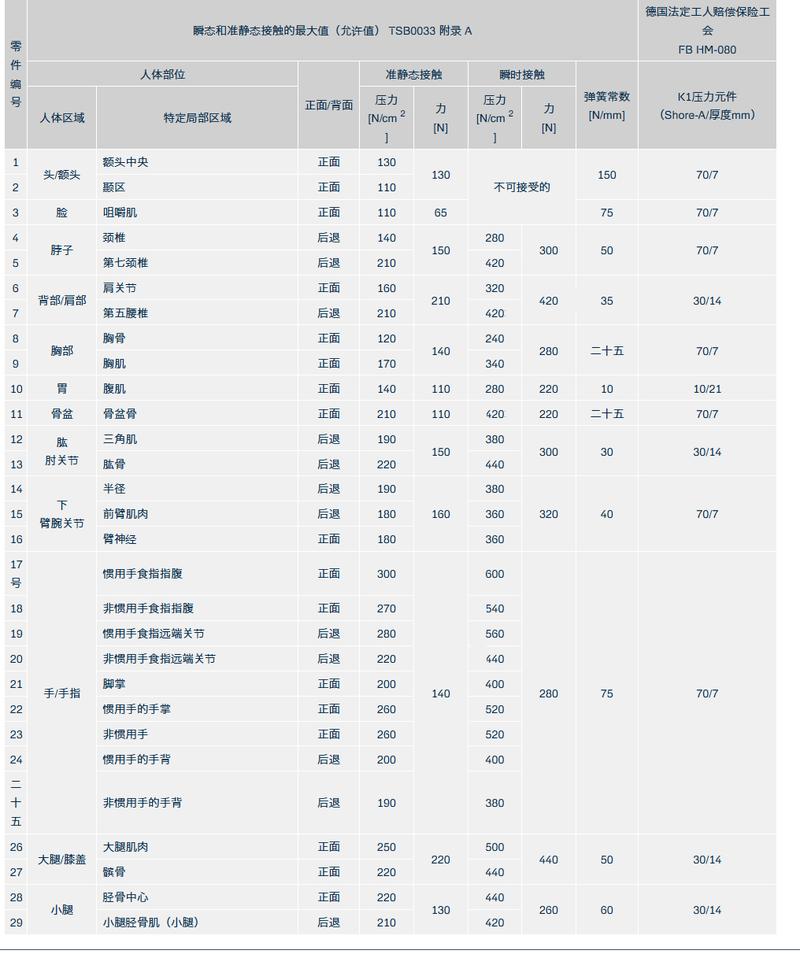
说到ISO/TS 15066,附录A那张人体各部位力/压力限值表真是宝贝。但很多人就止步于此了,以为只要把静态力控在150牛以下就万事大吉。💡 大错特错!标准明确区分了准静态接触和瞬态/冲击接触。前者是机器人慢慢压过来,你有时间反应;后者是毫无预料的快速碰撞,同样的力值,冲击压强可能是前者的3~5倍。而人体能承受的峰值压力,眼眶附近才110牛/平方厘米,太阳穴更脆弱。
所以评估时得考虑三个东西:机器人有效质量(不是负载质量!是运动部件折算到接触点的质量)、速度上限、接触面积。这三者耦合出来的结果,才决定你这台机器人到底能不能安全地‘摸’人。听起来复杂?确实复杂,这也是为什么很多集成商宁愿加一个激光雷达,再划个减速区,也不愿深挖参数——省事嘛。可一旦速度监控失效呢?
安全冗余不是多花几万块,是省下一辈子麻烦
吐槽完了,说点实操的。去年我们帮一家压铸厂改造取件工站,原来靠人工用钳子夹,高温粉尘重,工人怨声载道。上协作臂没问题,但旁边就是人员通道,不可能用围栏。怎么办?
✅ 第一步,安全功能回路必须双通道。这句话值千金——从急停按钮到安全PLC,再到伺服驱动的STO端子,必须保证任意单点故障都不能让安全功能失效。我们用了经认证的安全继电器模块,连电机抱闸控制都做了冗余。
✅ 第二步,主动式功率与速度限制,并设定三个空间监测区域:抱闸区(接近目标,减速至250mm/s以下)、警告区(黄色警示)、停机区。所有监测都靠安全力矩断开(STO)和安全限速(SLS)来实现。
✅ 最容易被忽视的是定期验证。标准要求至少每年复核一次安全功能?可现实是,产线挪个位置、换个治具,安全特性可能就变了。我们给客户立的规矩是:工况每变一次,必须重做力值测试,并记录在档。有人觉得太死板,但在我看来,这就是活该安全的底气。
问:工厂里已经有一台通过ISO 13849认证的安全PLC,接协作机器人时还需要额外安全模块吗?
答:不一定,但你得确认PLC的安全等级(PLr)是否匹配。如果机器人系统要求PL d或更高,而你的安全PLC只到PL c,那就必须外挂安全模块,或者更换更高等级的控制器。千万别想当然地把标准安全IO点直接连设备——有些安全功能需要安全脉冲输出(例如故障排除),普通IO搞不定的。
问:协作臂末端装了视觉相机,会不会影响安全评估?
答:太会了!任何新增末端附件都改变了运动部分的质量和可能的接触形状。相机外罩是尖角?那接触压强可能超标;相机线缆拖拽会不会导致意外力?如果视觉系统影响机器人轨迹路径,那还得重新界定空间风险。所以,哪怕只是拧上一个轻巧的镜头,也请重新过一遍风险评估表。别嫌麻烦,事故可不会嫌你太谨慎。
写在最后:标准不是天花板,是地板
我见过最离谱的说法是:‘我们的机器人安全等级够高,可以完全不用防护措施’。说这话的人,大概从来没读过标准附录里的失效概率分析。安全从来不是靠某个单一数值保障,而是一个包含了设计、集成、验证、培训、维护的完整生命周期。工业安全标准给的是最低门槛,你知道吗?踩在门槛上跳舞,迟早会绊倒。
所以,下次当你看着那台优雅运动的协作臂时,不妨多问一句:这套系统的安全功能,今天是完好的吗?一丝犹疑,便已值回所有投入。