第一次见激光雷达,是在一条老旧的AGV导航线上。那玩意儿转得飞快,咔咔响。当时我心想:这不就是个高级点的红外测距仪吗?后来被打脸了——它远不止如此。
说实话,激光雷达(LiDAR)这几年的进化速度,让人有点跟不上。从单线到多线,从机械旋转到固态,从几万块到几千块……你以为只是参数在变?背后的应用逻辑早就翻天覆地了。特别是工业场景,真的不是“买个贵的就行”。
激光雷达到底在“看”什么?
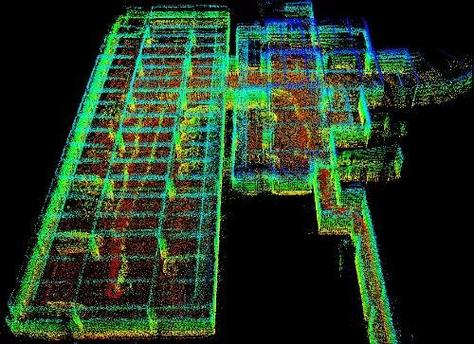
很多人把激光雷达和摄像头混为一谈。错!摄像头是被动接收光,激光雷达是自己发激光自己收,核心是时间飞行法(ToF)。它发射一束脉冲激光,打到物体再弹回来,根据时间差算距离。每一束激光算一个点,一秒钟打几十万个点,你就得到了一个三维点云。这个点云里,藏着物体的形状、位置甚至速度。工业上用它做什么?AGV导航、机械臂定位、料堆体积测量、安全防护……太多了。但其实,难点不在硬件,在点云处理。你拿到的是一堆密密麻麻的坐标数据,怎么把这些数据变成机器能理解的语义信息?这才是分水岭。
我有个同行,做仓储AGV,贪便宜选了某国产单线雷达。结果一到强光环境就丢定位,几百万的自动仓库差点撞货架。他后来跟我吐槽:“参数表上写的都是实验室环境,现场哪有什么完美条件!”——这是血的教训。选型时,抗环境光、雨雾穿透能力、多回波技术这些才是要死死盯住的指标。
固态还是机械?这根本不是技术问题
突然想起两年前,一家做无人叉车的初创公司,执着于用固态激光雷达。理由是“没有旋转部件,寿命长,体积小”。结果呢?视场角受限,正前方障碍物检测还行,侧面就完蛋。叉车倒车时经常撞到低矮的托盘。后来他们灰溜溜地换回混合固态方案,成本还更高了。所以,架构没有绝对好坏,全看场景。室内AGV,单线机械雷达够用,还便宜;室外港口无人卡,得用多线混合固态,甚至加毫米波雷达融合;要测量精度高的,比如铁轨轮廓检测,就得要高精度扫描式激光雷达。
这里聊个细节:很多人不知道,激光雷达的“线数”不是越高越好。128线当然爽,点云密集得像沙盘,可数据处理量爆炸,控制器成本跟着飞涨。工业现场最常见的是16线、32线,配合角度分辨率调优,性价比最高。我见过一家公司用8线雷达做料仓料位检测,算法写得好,误差能控制在±5cm,比某些用128线的还准。关键在人,不在设备。

说到算法,就不得不提SLAM。激光SLAM是AGV自主导航的基础,但真正落地的坑一大堆。最常见的是:长走廊退化。纯激光SLAM在长直走廊里没有明显几何特征,位置估计会漂移。怎么办?融合IMU、轮速计,甚至用二维码做绝对定位。这种工程问题,论文里不会写,只有踩过坑才知道。我特别反感那些只吹技术理论不聊落地的人——工业现场有一万种办法让理论失灵。
激光雷达安全防护:被忽略的“合规”陷阱
你可能觉得,激光雷达不就是种传感器吗?错!它还涉及安全标准。在欧洲,AGV的安全防护区域必须通过ISO 13849或IEC 62061认证,激光雷达作为安全相关部件,需要达到PL d或SIL 2等级。国内不少工厂用非安全型雷达做人员检测,心里赌的是员工不会随便进区域——这简直是拿人命开玩笑。去年某汽车车间出了事,机械臂砸到人,事后发现安全激光雷达感应区被屏蔽了。为什么屏蔽?因为误报太多,影响效率。根源就是选错了雷达,安全型雷达具备自检、双通道输出、固定区域遮蔽等特性,误报率极低。至今还有很多集成商分不清普通测距雷达和安全雷达,价格差好几倍,但事故成本是多少?这笔账,希望老板们算清楚。
问:我工厂想上AGV,选激光雷达要注意哪些环境干扰?
答:最常见的有三种。第一,强光——高功率照明或直射阳光会让雷达接收器饱和,必须看参数里的抗光等级,至少到100klx。第二,粉尘——木工车间、水泥厂等,激光会被悬浮颗粒散射,造成虚假回波,一定要选带多回波探测功能的,能区分真实物体和尘埃。第三,镜面反射——比如光滑地板上贴的不锈钢护板,可能导致雷达完全收不到回波,这种情况需要调整安装角度,避免垂直入射。另外,如果车间有无线遥控设备,注意同频干扰,2.4GHz和激光不冲突,但有些旧款雷达用红外调制,容易受影响。
问:固态激光雷达在工业上到底能不能用?
答:能,但要克制。Flash型固态雷达帧率高,无运动部件,适合近距离、固定区域的检测,比如机器手操作区的侵入防护。但远距离、大范围的导航还是推荐旋转式MEMS混合固态。OPA相控阵固态雷达技术还不成熟,工业现场要谨慎。一句话:别被“全固态”概念洗脑,看FOV、探测距离、分辨率这些硬参数,以及环境耐受测试报告。
还有个小道消息:某巨头最近在推FMCW激光雷达,能同时测距测速,抗干扰极强,但成本下不来。未来五年内,工业主流还是脉冲ToF。不过,FMCW在矿山无人卡车上有前景,因为粉尘大、车速低,需要速度信息做实时规划。技术路线之争,从来不是工程师说了算,是市场和资本。唉。
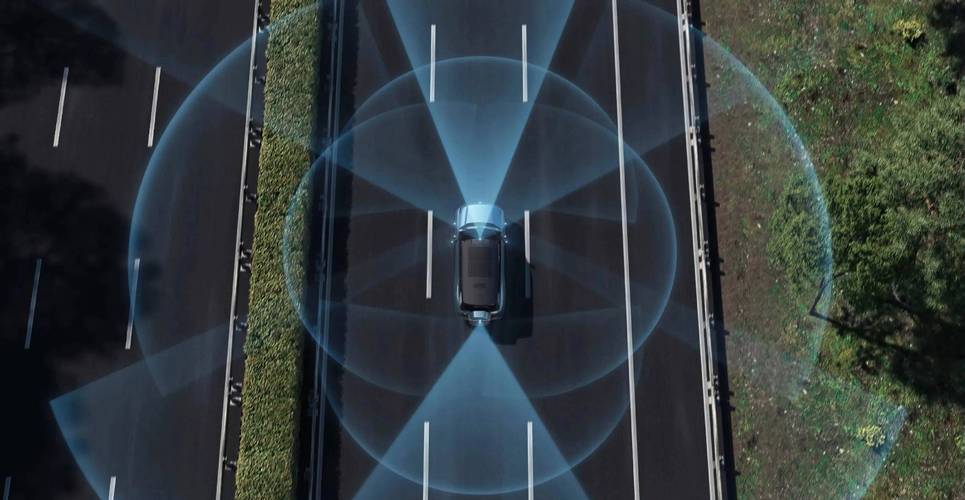
最后说一句,激光雷达不是孤立使用的。多传感器融合是趋势。视觉和激光的融合(V-SLAM)在复杂动态环境下很有效,但标定复杂,算力要求高。超声波和激光的融合,在低速避障中性价比高。毫米波雷达和激光互补,解决恶劣天气问题。总之,没有银弹,只有针对性的方案。
这篇文章里提到的坑,都是真金白银砸出来的教训。希望你别再重复同样的错误。如果真要问我现在最看好哪个方向,我会说:用于移动机器人自主充电的激光雷达定位模组,又小又准,能精确对接待充触点,市场爆发点快到了。不过,那就是另一个故事了。