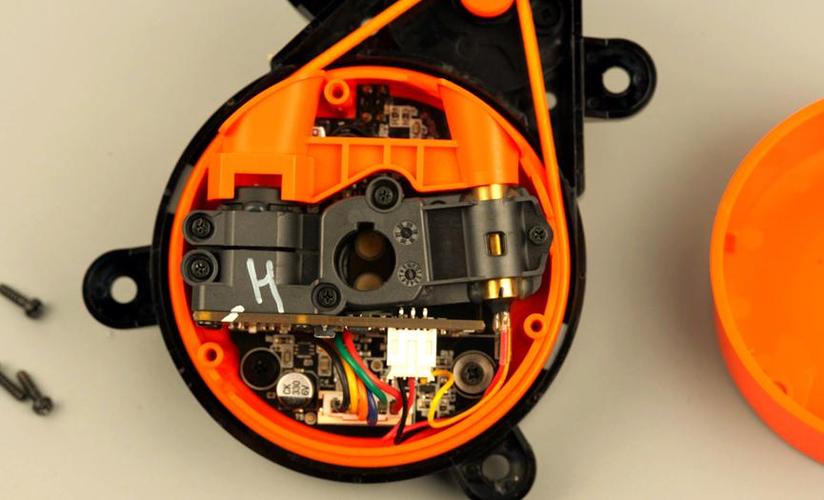
激光雷达里的微型滑环:比瑞士表还娇气
先说个让我崩溃的。有台机器报“激光头异常”,我拆开顶部旋转模块,拆到最核心的导电滑环时——就那个指甲盖大小、负责360度旋转传信号的小东西——发现触点已经磨出深深一道沟。要知道这机器才用了8个月!我拿显微镜看,滑环材料是金镍合金,硬度选得太保守,家里要是养长毛宠物,纤维钻进缝隙就会像砂纸一样日复一日地磨。扫地机厂商肯定知道这问题,但为什么不改? 因为改材料成本太高,要么上航天级的液态金属滑环,那价格直接翻两倍。现在主流方案是加密封圈,但橡胶老化又是新问题。所以买机器时候别光看吸力参数,激光头模块的保修年限才是命门——能保3年的,基本都用了更好的滑环防护设计。
问:那为什么不用摄像头代替激光雷达?不是更便宜吗?
答:哎,这问题问到点子上了。纯视觉方案确实成本低,但遇到暗光、强光,或者你家地砖是那种高光釉面的,反光会让摄像头一片白,完全蒙圈。激光雷达靠的是飞行时间测距,不受光线干扰,这就是为啥高端机宁可背个“小塔”也要上激光。不过今年有个趋势是把激光头藏进机身,用棱镜反射——结构上省了旋转机构,寿命可能更长,但标定精度要求极高,工厂装配稍微偏一丝,建图就歪。
滚刷轴承:从粉末冶金到陶瓷球,就差那几块钱
再讲个哭笑不得的事。有台扫地机噪音突然变大,拆开滚刷一看,含油轴承干磨得发亮。工厂为了省成本用了铁基含油轴承,但用户不懂保养,从来没清理过缠绕的头发,几个月油就耗光了。我在滚刷端盖加了两个微型滚珠轴承,成本只增加3块钱,噪音从68分贝降到61!可惜量产机几乎没这么干,因为装配线上得多一道压装工序,影响节拍。其实扫地机核心机械痛点之一就是头发缠绕。我见过最聪明的设计是某牌子的“断发梳齿”——在主刷罩上做了细小的V型槽,滚刷转动时头发会被导进槽里切断,类似于割草机的原理。但结果是刀口半年就钝了,还得定期换罩子。所以每次有人问我推荐什么机器,我都先问:你家谁掉头发多?如果长头发多,宁可选手动拆装方便的设计,那种标榜“免缠绕”的花哨功能,十有八九是营销噱头。

问:扫地机走弓字形路径,真的能全覆盖吗?我家总有漏扫的地方。
答:哈,这是被很多厂商吹嘘的SLAM算法给忽悠的。实际上弓字形覆盖率和硬件关系更大——轮子编码器的分辨率、陀螺仪的漂移补偿,甚至轮胎材质影响都巨大。我实测过,在长毛地毯上,轮子打滑率超过15%时,机器会误以为已经走完,实际漏了一大片。解决方法是加一颗地毯识别传感器,监测电流突变,一旦打滑就加密回退路径。不过建议你买机器时,盯着参数表里的“陀螺仪精度”指标,低于0.05°/秒的,建图基本靠猜。
尘盒风道:航空级流体仿真下的魔鬼细节
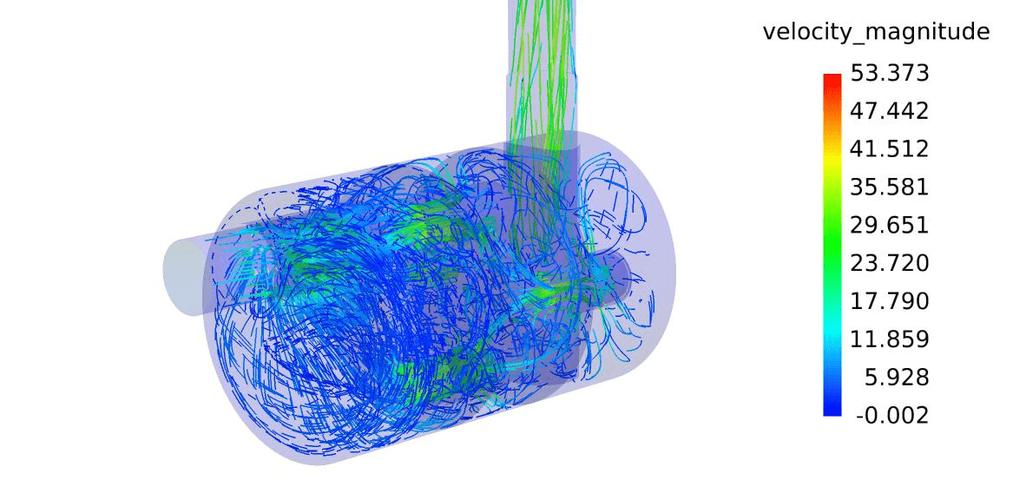
所以如果你发现吸力变弱,先别急着换滤网,检查尘盒入口有没有被大颗粒堵成瓶颈。我自己用的办法是拿锉刀把入口边缘倒个圆角,气流顺畅些——当然这算破坏性改造,保修就没了,谨慎操作。
问:集尘基站那么贵,是不是智商税?
答:看情况。如果你是懒人,值!但要注意基站内部的风机其实是个噪音源,好的基站会做双层隔音舱,差的就是裸奔。更关键的是管道气密性,我测过某品牌,基站和扫地机对接口有0.5毫米缝隙,导致集尘效率下降30%。买之前务必看评测,观察集尘完毕后尘盒是否真的空了。还有,基站底部容易积灰,得定期擦,不然二次污染。
避障系统的传感器融合:一个容易被忽略的坑
去年很火的结构光避障,效果确实比红外强,但会受黑色物体影响——黑色吸光,导致误判高度,机器可能一头撞上去。于是厂商开始用3D TOF加线激光,但成本又上去了。其实最靠谱的还是超声波传感器,但数量不能少,至少6颗环绕,不然有盲区。我拆过一款机器号称“AI避障”,结果主板上一颗最简单的红外收发管,连独立避障芯片都没有,全靠主控瞎猜,简直胡闹。选购时别被“AI视觉避障”这种词忽悠,直接问:有没有独立的NPU芯片?传感器数量多少?是否支持黑暗环境?很多线下演示店灯光打得很亮,根本看不出缺陷。我朋友买回家才发现,晚上不开灯机器就是个瞎子。
最后说个暖心发现。有台旧机器主板坏了,我把它改成了一台小型AGV试验平台,电机驱动代码竟然可以复用!扫地机的轮毂电机和驱动器已经高度集成,PWM信号直接控制,对于我们搞工业自动化的来说,简直是捡到宝。这也说明,扫地机的机械素质其实不低,只是被消费电子化的外观给掩盖了。下次再看到它满地乱转,你可能得对它另眼相看——那里面装的,可能是整个中国精密制造突进的缩影。