关节里藏着的猫腻:力矩传感器与那一坨“黑盒子”
先说个大多数人都没拆过的真相——一台标称“±1N·m力矩分辨率”的协作臂,拆开关节,里面居然有两套传感器。一套是靠近电机端的低成本霍尔传感器,另一套才是正经的力矩传感器,但供货渠道……算了,不能说太细。 这导致什么呢?轻载示教时精度还行,一旦负载超过额定值的60%,那轨迹飘得你怀疑人生。 有次拿某国产六轴做圆弧插补,末端加个3公斤的抓手,画出来的圆直接变成了椭圆——椭圆还带抖的。当时带我的老师傅憋了半天,吐出一句:“这机器是要我带着它跳舞么?”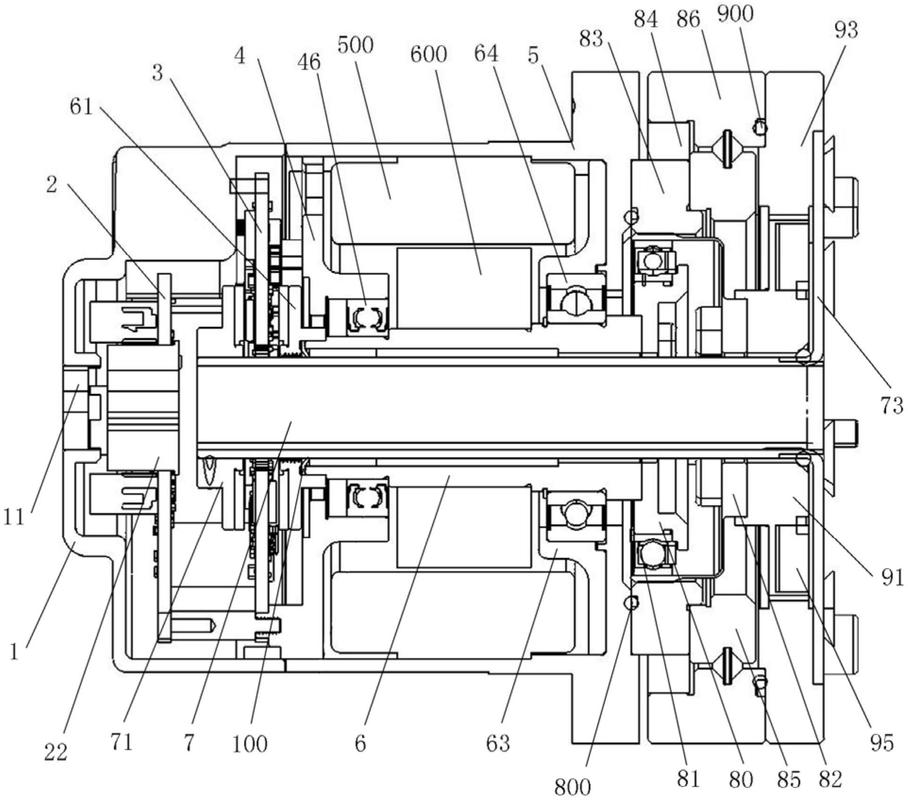
拖拽示教:展厅里的玩具,产线上的累赘
展厅里看工程师轻轻一拽,机械臂顺滑得跟丝绸一样。等买回来,你让产线工人试试? 那条工位的李姐,拽了两次就甩手不干了——“轻了它不动,重了它猛地一窜,差点把我帽子打飞!”❗ 问题出在力控增益参数。默认参数都是实验室里用标准动作标的,到了现场,操作者的身高、习惯发力方向、甚至手心出汗程度,全都影响体验。而且大部分厂家把这部分参数藏得极深,问售后就让你“重新标定零点”。 问:拖拽示教功能看起来很友好,为什么实际生产中却很少用? 答:简单粗暴——难调、费时、一致性差。一台标好轨迹的机器人,换成另一个工友来拖,绝对跑偏。大批量产线讲究节拍和一致性,谁有空天天给你标定?所以最后都打回原形,老老实实写脚本用示教器。更坑的是,有些低端机型的拖拽是基于电流环估算力矩,根本没有真实传感器,那感觉得多糟糕……你自己品。
那套号称“开箱即用”的视觉,差点把传送带整报废

部署成本:那个藏着掖着的“免维护”笑话
最后几句大实话