上周四深夜,车间里那台新上的六轴机器人突然开始‘抽风’。机械臂本该抓取毛坯,结果它顿了顿,直接甩向防护栏——幸好没伤着人。我蹲在电柜前查了俩小时,最终发现是振动传感器的一个字节错误,导致补偿算法跑飞。就这一个字节,差点百万设备报废。说实话,工业自动化这行,纸上谈兵和真刀真枪差太多。今天不扯虚的,聊点硬核的,那些教科书不会告诉你的实战细节。
传感器选型:不是参数漂亮就行
很多人以为,选传感器就是对着数据手册比精度、比量程。天真!现场环境复杂到你想象不到。油污、振动、电磁干扰,任何一个都能让‘实验室精准’变成‘产线随机’。去年有个项目,在焊接车间用激光位移传感器做定位。结果焊渣飞溅,保护镜片两天一换,维护成本远超设备本身。后来我强制改用电感式+耐高温套件,虽然原始精度降了0.01mm,但uptime从70%飙到99%。这才是现实——稳定性永远优于纸面精度。你如果也在粉尘大的场合,忘掉光学,考虑涡流或接触式,别被销售忽悠。

PLC 和上位机的那点破事
说到通讯协议,Modbus TCP、Profinet、EtherCAT……听着头大对吧?但真正让人抓狂的不是协议本身,是时间同步。有一次,上位机定时10ms读一次PLC的轴位置,结果波形显示机械振动频率异常。查了两天,发现是PLC扫描周期抖动,导致采集到的位置序列混乱。解决方案?在PLC里用硬件中断锁存位置值,上位机通过触发标记读取。这细节,书本上顶多一笔带过。所以啊,做运动控制,务必搞清楚控制器的底层任务周期,别迷信‘高速通讯’就能解决一切。还有,接地!好多奇怪错误,拧紧一根等电位连接线就好了。你真遇到过吗?
问:新项目该选总线型PLC还是传统硬接线?
答:看IO点数和响应要求。200点以下、10ms够用的,硬接线省心省钱。超过500点,或者有大量模拟量、同步轴,果断走总线。但总线别混搭,一个主站下尽量单一协议,否则调试能让你怀疑人生。我踩过的坑,一个产线用三种总线网关,结果数据丢包找不到源头,最后全换成Profinet才消停。
问:视觉系统跟机器人标定,怎么快又准?
答:九点标定法是最基础的,但要注意基准平面。很多时候,标定板放不平,或者相机有径向畸变没校准,直接导致外沿精度惨不忍睹。我现在都要求用陶瓷平板+光学参考点,标定完再跑一个全区域验证轨迹。别省那半个小时,否则后面废品率可能高一截。
数据采集与 MES 集成的馅饼与陷阱
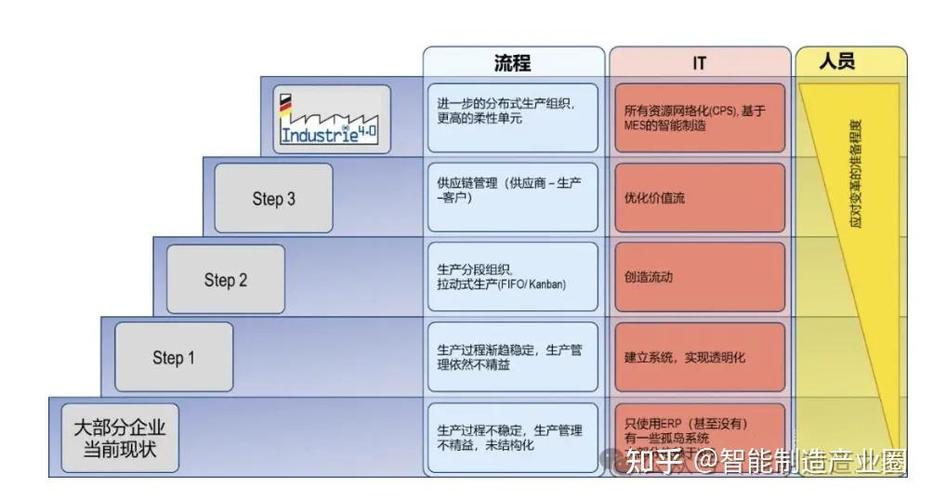
都在喊工业4.0,MES系统都快成了标配。但现实是,产线设备数据能采上来三成就算不错。老设备没网口,新设备接口不统一,OPC UA 虽好,可很多PLC固件不支持,升级又要钱。我们自己开发了一套边缘计算网关,用 Node-RED 做解析,再推给云平台。这样做的好处是灵活,坏处是维护累死人。不过话说回来,数据在精而不在多。几条关键质量参数持续跟踪,比乱采一通有用多了。有次客户要求输出所有IO状态,每秒几千个点,存储爆炸不说,分析人员根本看不过来。后来我们只提取异常事件前后的数据段,效率立马提升。
最后想说,工业自动化这个领域,它不是简单的设备堆砌,更像系统工程学,充满了权衡和妥协。你计划得再完美,一旦通电通气,各种古怪问题就冒出来了。但这就是它的魅力啊,解决一个硬骨头,那种成就感,爽!