说真的,干了十几年自动化集成,我极少见到一个细分领域像机器人码垛这样——看上去简单得要命,实际落地能让人掉光头发。记得三年前第一次给食品厂配码垛单元,销售拍胸脯说‘这玩意儿就是个机械臂,抓起来放下去’,结果呢?一堆箱子砸得七零八落,生产线停了半天,客户脸都绿了。那之后我才明白,机器人码垛根本不是买台机器人就能搞定的事,它是个系统工程。

末端工具:90%的失败都栽在这儿
很多人以为选好机器人本体就完事。——天真了。真正的核心是末端执行器,俗称‘抓手’。箱子软、硬、带盖、无盖、透气孔位置……差一个参数,吸盘就可能漏气,或者把纸箱撕掉一层皮。我们做过一个项目,箱子表面有防滑涂层,普通硅胶吸盘根本吸不住,最后专门定制了海绵吸具,一个就花了小两万。❗ 记住:没有万能的末端工具,只有针对物料特性设计的方案。另外注意,吸盘布局不是越密越好,要考虑气流通道,否则某些箱子抓起来歪歪扭扭,码垛层间错位,整垛倒塌风险剧增。
问:机器人码垛系统对纸箱尺寸变动敏感吗?
答:非常敏感,哪怕长宽变化5毫米,原先设定的抓取点都会偏移。如果产线涉及多规格混码,必须上视觉引导,否则机器人只能按固定点位走,一换规格就崩溃。我们在饮料线引入3D视觉后,切换时间从半小时缩到五分钟,但一次性投入多了二十万。看预算吧,长期看绝对值得。💡
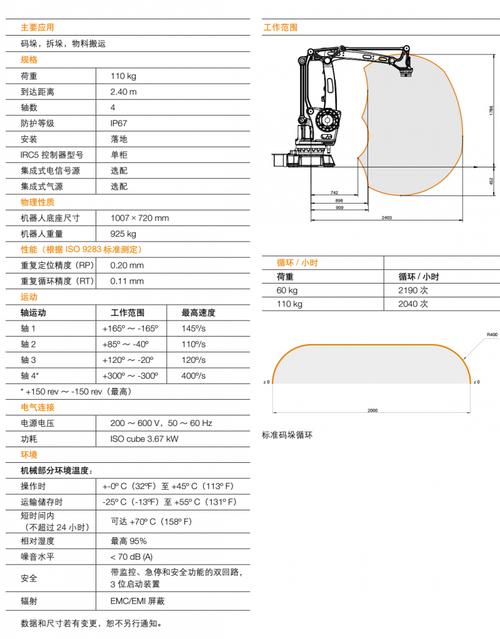
臂展与负载:别被样本上的曲线骗了
厂家样本总是画得挺美,实际工况下,机器人码垛的有效负载和惯量限制远比想象中严苛。比方你抓一个25公斤的箱子,夹具本身可能就有七八公斤,总负载超三十公斤,而机器人标称负载可能刚好35公斤——危险!因为要留出加减速的力矩余量。有一回我们用某品牌四轴码垛机,参数表写负载50公斤,结果码到第四层、臂展最长时频繁报警过载。查了半天,发现是箱体重心偏前,加上高速启停产生的惯性扭矩超出了关节电机极限。后来只能降速,节拍慢了12%,但总算稳定了。教训:选型时建议按实际负载乘以1.2倍安全系数,且必须核算最远位置的动态力矩。
问:码垛机器人的重复定位精度重要吗?
答:重要,但没想象的那么关键。一般码垛用±0.5mm足够,不像激光焊接那么变态。不过你要是抓软包袋,袋子变形会引入几毫米误差,这时候高精度就是浪费。相比之下,码放逻辑的合理性更影响稳定性,比如层间转向、交错堆叠,这些软件算法才是防塌垛的秘诀。🤔
柔性还是刚性?都不如皮实

这两年‘柔性生产’概念火得一塌糊涂,机器人码垛确实能适应多品种,但别为此牺牲了节拍。我见过最极端的案例,药厂要求一条线兼容八种箱子、四种托盘尺寸,结果程序复杂得吓人,换产要装新抓手、调参数、做验证,每次大半天——根本谈不上柔性,而是折磨。反倒一些看似‘笨’的方案,比如气动码垛机,一天码两万件,十年没坏过一次。所以,是否选择机器人码垛,核心看真实需求:多品种小批量,机器人合适;单一品种超大产量,或许传统机械式更划算。
问:机器人码垛系统的后期维护成本高吗?
答:主要看工作环境。如果是粉尘、潮湿或腐蚀性场合,必须选防护等级IP65以上的型号,并定期更换密封件,否则内部减速机、轴承很快完蛋。我们有个饲料厂的案子,当初为了省钱用普通型,半年换了两台电机,维修费够买台新机器人了。另外,末端吸盘和真空发生器是易耗件,一年下来也要小几千块。总体上说,维护得当的话,机器人本体寿命七八年没问题,控制系统可能更久,但务必盯紧电缆束和接头。⚙️
集成商的坑,一个比一个深
最后必须吐槽一下:机器人码垛项目的成败,七分看集成商。有的公司只管卖设备,工艺调试一塌糊涂,箱子码得歪七扭八,调了两周都交不了钥匙。❗ 一定要看他们过往的同类案例,最好去现场跑一圈。我还有一条血泪经验:合同里务必明确节拍、垛型稳定性、故障率等量化指标,心软就是给自己挖坑。另外,编程示教器的友好程度也影响后期维护,有些老款机器人,界面逻辑堪比九十年代手机,操作工学得想骂街。现在新款都好多了,图形化编程、拖动示教,一两天就能上手。
说到底,机器人码垛不像数控机床那样有一刀切的参数,它是一个需要根据具体物料、物流、场地来定制的解决方案。别信万能机型,也别怕花钱做前期仿真,那点投入在后续稳定运行面前,简直是洒洒水。💪